About
On the job market. I am seeking research positions in computational imaging, in both industry and academia, starting Summer 2026. Please feel free to reach out, or view my CV (academia) or resume (industry).

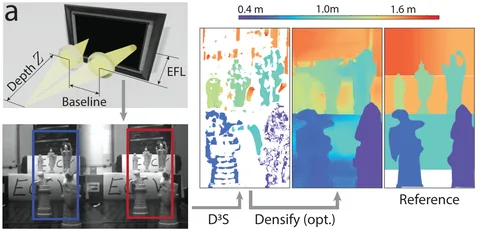
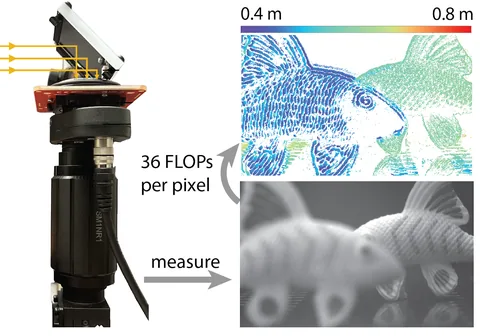
I am a PhD student in the School of Electrical and Computer Engineering at Purdue University, advised by Prof. Qi Guo. I work on passive depth sensing and computational imaging, with a focus on depth-from-defocus (DfD) and triangulation-based methods. My most recent work, Depth from Dual Differential Defocus and Stereo Consensus (D3S), unifies differential defocus with stereo triangulation to recover accurate depth from a 4-mm baseline compact binocular system, pushing the trade-off between form factor and working range.
I also work closely with Prof. Emma Alexander, who serves as a co-corresponding author on my first-author papers and has shaped much of my research thinking.
Broadly, I am interested in designing imaging systems and algorithms that extract reliable 3D information.
Research Interests
- Computational imaging and hardware–algorithm co-design
- Passive 3D sensing and depth estimation
- Joint optical design and end-to-end optimization of imaging systems
- Photon-limited and single-photon imaging
- Snapshot and real-time imaging systems
- Deep learning and generative models for computational imaging